Hello all, M@ here with an in-depth look at what exactly goes into assembling an unbelievable giant hexapod robot. Normally I do controls (software) and document our efforts, but today I’m helping with the physical building process.
Before I get started, let me first say what a great honor it is to have had such an amazing Kickstarter response, your faith in our project blows me away. We’re just as excited about this project as you are… it’s incredible… it’s going to be great!
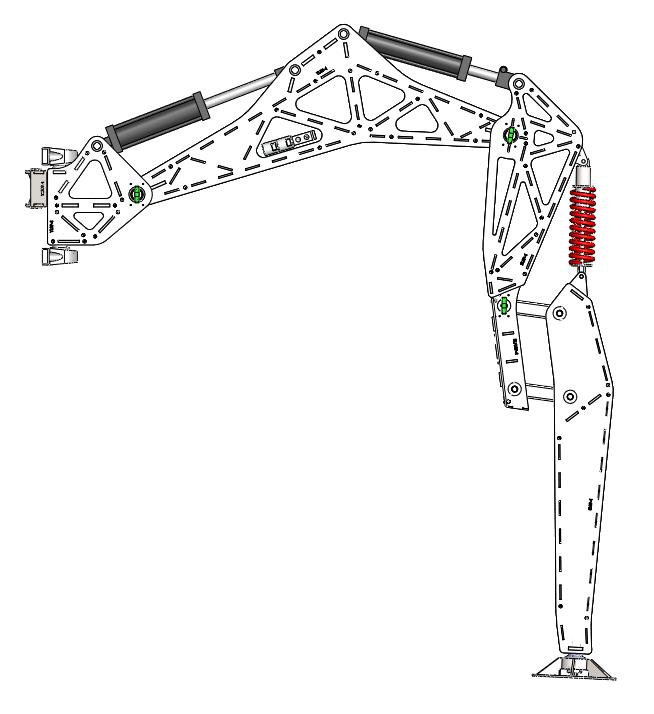
Today we’re going to be looking at the thigh link. As it was delivered to us from the waterjet company our leg looked like: Continue reading Anatomy of a Thigh Link
It’s been less than a week since we launched our Kickstarter and we are 72% funded. This is mindblowing! Thank you everyone for donating, for spreading the word, and for believing in us.
We’ve received a couple of requests about the code repository and realized we haven’t ever publicly shared the link. Presently the central repository is a collaborative sandbox and full of experimental code, we will be separating a release branch out soon. In the meantime, the link for the curious is here.
We’ve also had generous offers from remote developers who want to help. Thank you! We’ll be figuring out the right way to incorporate public contributions as we clean up the repository, stay tuned.
Heightmapped terrain is now supported in the simulator. This will let us simulate much more complex and interesting situations than we could previously. Here’s a short demo of what that looks like with Stompy walking blindly forward. The ground is red in honor of the Mars landing.
After months in the making, the day of our Kickstarter is finally here! Over the next 30 days we need to raise $65,000 to construct our designs and help take indie robotics to the next level.
So to all of our readers who are ready to see Stompy move out of simulation and into the real world, please spread this link! Because you want to advance open-source robotics. Because you want to see an awesome, giant robot in a world dominated by meat-popsicles. Whatever floats your boat.
Click this. Repost this. Your support means the world to us, please spread the word. Stompy is coming.
So we just wrapped our Swag Design Contest up, and we’re proud to present the winners. If you read our previous post, you know that we were looking for entries for a Bumper Sticker, Supporter T-Shirt, and Team T-Shirt. These items are destined to become swag offered in our upcoming Kickstarter campaign, coming up next week!
We ended up with 37 submissions in the contest, and the team voted over the course of the past weekend on which designs they liked the best. Without further ado, we give you…
The Bumper Sticker:
Far and away the Internet's favorite hexapod-related slogan, this bumper sticker proudly proclaims your dissatisfaction with common modes of transport. Continue reading Swag Design Contest Winners!
I’m happy to announce Gimpy’s somewhat spastic composure in his first few videos has been much mellowed by improvements in the controls code. Below you can see Gimpy scooting himself around Building 13 of the Artisan’s Asylum. Remember that Gimpy weighs about 400 lbs, and the battery cart strapped to him adds another 200 lbs.
So we have this swag design contest going right now, ending next Friday, and we’ve had a number of designers mention that they’d love to see some examples of potential slogans. We’ve compiled a couple of our favorites here; feel free to add your own or give us feedback in the comments!
Giant Robots: Because life isn’t dangerous enough.
My other car has 6 legs.
If you have to ask why I build giant robots for fun, you might not like my new best friend/ride.
Robots: Man’s other best friend.
We build because we can.
I build giant robots. If you see me running, try to keep up.
Wheels are overrated.
Wheels are so Mesopotamian
Stompy: Dragging you into the future, 6 feet at a time.
Be nice to the robots. They’re bigger than you.
Robots: You’re what’s for dinner.
Humans: The other white meat.
5 gallons to the mile. Wouldn’t have it any other way.
After months of fabrication, debugging, testing, more fabrication, and yet more debugging, we’re happy to announce that the leg cart rows itself right along! Check this out:
We have full inverse kinematic control of the test leg, and can get it to move the 600-pound cart in a straight line. The only catch, of course, is that we have to wheel the battery cart along behind the robot – hilarious shenanigans ensued. Next time, longer wires…
It’s still a little bit shaky, but we’re calling this good enough for now and moving on to the full-size prototype leg. We’re pretty sure our pistons on the test leg generate maximum forces that result in relatively low accelerations of our legs (the yaw piston produces around 800 pounds of force, to move a 150 pound leg), which is why everything’s so wobbly. We’re also pretty sure that slapping pistons that generate 12,000 to 18,000 pounds of force on 350-pound legs will take most of that wobble RIGHT OUT.
Now, on to the full size leg and Stompy!
Keep an eye out for my next update on how our full-size legs are designed.
So in case you didn’t know, we’re building Stompy, a 4,000 pound, propane-powered, 6-legged hydraulic walking robot that seats two. We’re about to put out a call to fundraise for the final robot via Kickstarter, and we want to have really awesome stuff to give away. If this doesn’t call for some cool logos, T-shirts and bumper stickers, we don’t know what does.
We, unfortunately, are all engineers, and those particular kinds of design skills have atrophied over the years, if they ever existed.
Thus, we introduce the Project Hexapod Swag Design Contest!
We would like designs for the following:
1. A bumper sticker. This is the reward for the first Kickstarter level, where you declare your undying love for giant robots by vandalizing nearby surfaces with adhesive-backed paper.
2. A supporter T-shirt. This is the shirt you get at one of the low-to-medium Kickstarter levels that screams “A bunch of nutjobs up in Boston have built a giant, life-endangering walking robot, and it’s so amazingly cool I bought this shirt to support them.”
3. A team T-shirt. This is the shirt that the 19 robot builders get to wear to fairs, job interviews, first dates, etc. It has to say “I build giant, life-endangering robots for fun, and if you have to ask why you wouldn’t understand the answer.” We’re looking for a comical front design here; the back would be designed later to include sponsor logos, team member names, and other shout-outs.
For those designs, we are putting up the following prizes:
1. A $100 prize for winning a category (up to $300 for winning all 3)
2. A free ride on the finished Stompy robot
3. If you win all 3 categories, free driver training on the Stompy robot instead of a ride
Both T-shirts are restricted to 4 colors or less so that they can be silkscreened cheaply; the bumper sticker will be digitally printed, and can be whatever colors you want. The supporter T-shirt will be one-sided – you choose whether it’s the front or back. Entrants (except for the bumper sticker) must be capable of producing color-separated files that could be sent to a screenprinter. Upon submitting a design to the contest, you grant Project Hexapod a non-exclusive license to it for the indefinite future.
We would like the swag to be comically self-aware of how large, dangerous, and awesome this project is, all wrapped up into one design. Significant bonus points will be awarded for catchy slogans, cartoonish depictions, and humor. Ideally, a conceptual Stompy would be pictured in part or in whole, in a way that we could make into a logo.
Enter the contest by emailing rideablehexapod@gmail.com with the subject line “Swag Design Contest -” followed by “Bumper Sticker”, “Supporter T-Shirt”, or “Team T-Shirt”. Attach your image files to the message, along with any description you think is necessary. In your email, indicate if you are willing to modify the design given feedback or not. Enter as many different designs (in separate emails) as you’d like!
All entries must be received by noon on Friday, July 20th. Entries will be voted on by the Project Hexapod team, and winners will be notified by the following Wednesday.
Here’s some art from our most recent development to spur some creativity:
These are our legs at a slightly older stage of development, on the concept chassis
This is a comparison of our Gimpy leg to our full-size prototype leg.
This is what Stompy looks like relative to Dan, from the side.
This is what Stompy looks like relative to Dan, from the front.
This is what our full-size prototype leg will look like retracted.
This is what our full-size prototype leg will look like extended.
First I am pleased to announce that the Leg Cart has a name. It is now known as Gimpy.
We have been working hard trying to move Gimpy in a controlled way. “Controlled” here has a specific meaning… we mean we are controlling the joint with electronic feedback through a computer. If you’re new to control theory, the image below should give you an overview of what we’re trying to do.
Overall we are making progress and have demonstrated good closed-loop position control of our joints. We also exposed some system-level problems and snapped an actuator mount…
We have done additional tests since filming the video, but a combination of hardware problems (see our last post about ) has eaten most of our development time.
The knee joint in particular is prone to accumulating air and developing massive levels of uncontrollable backlash. We hypothesize that one of the reasons for this is that the knee actuator is the highest point in our hydraulic system, so when our system is unpowered bubbles will try to rise in to the knee. We are going to experiment with raising the pressure on the return lines and co-locating the knee control valve with the actuator, both of which could help with the air problems.
The whole reason we built the test leg was to learn the ‘gotchas’ of our component selection. These setbacks are expected and welcome, because now we can avoid them on the hexapod proper.