Here’s where we’re at.
Physical robot is mostly done
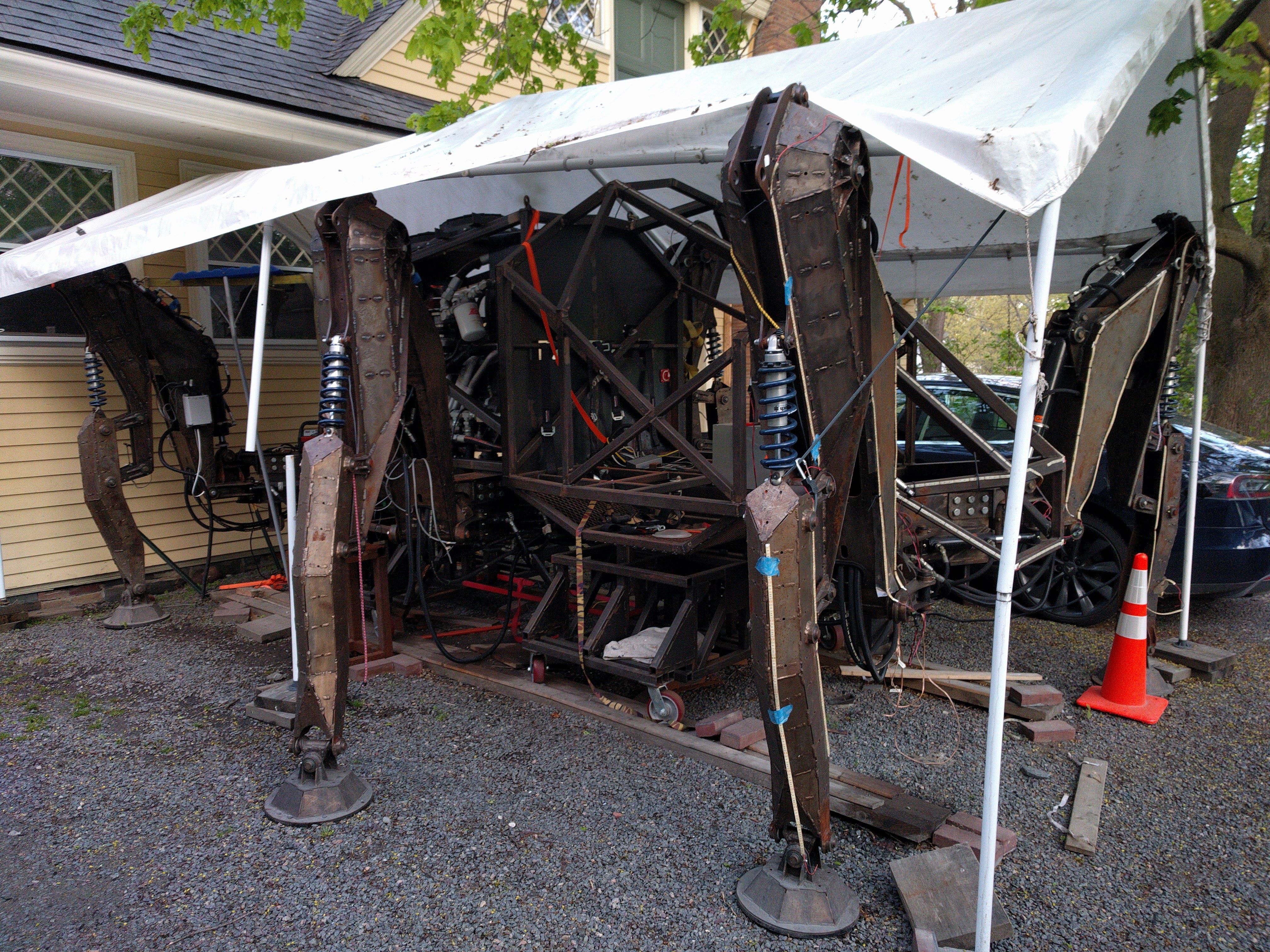
Stompy is built! There are six legs, a chassis, a roll cage, and an engine. The engine runs and powers the hydraulics. All of the hydraulics are hooked up and working properly.
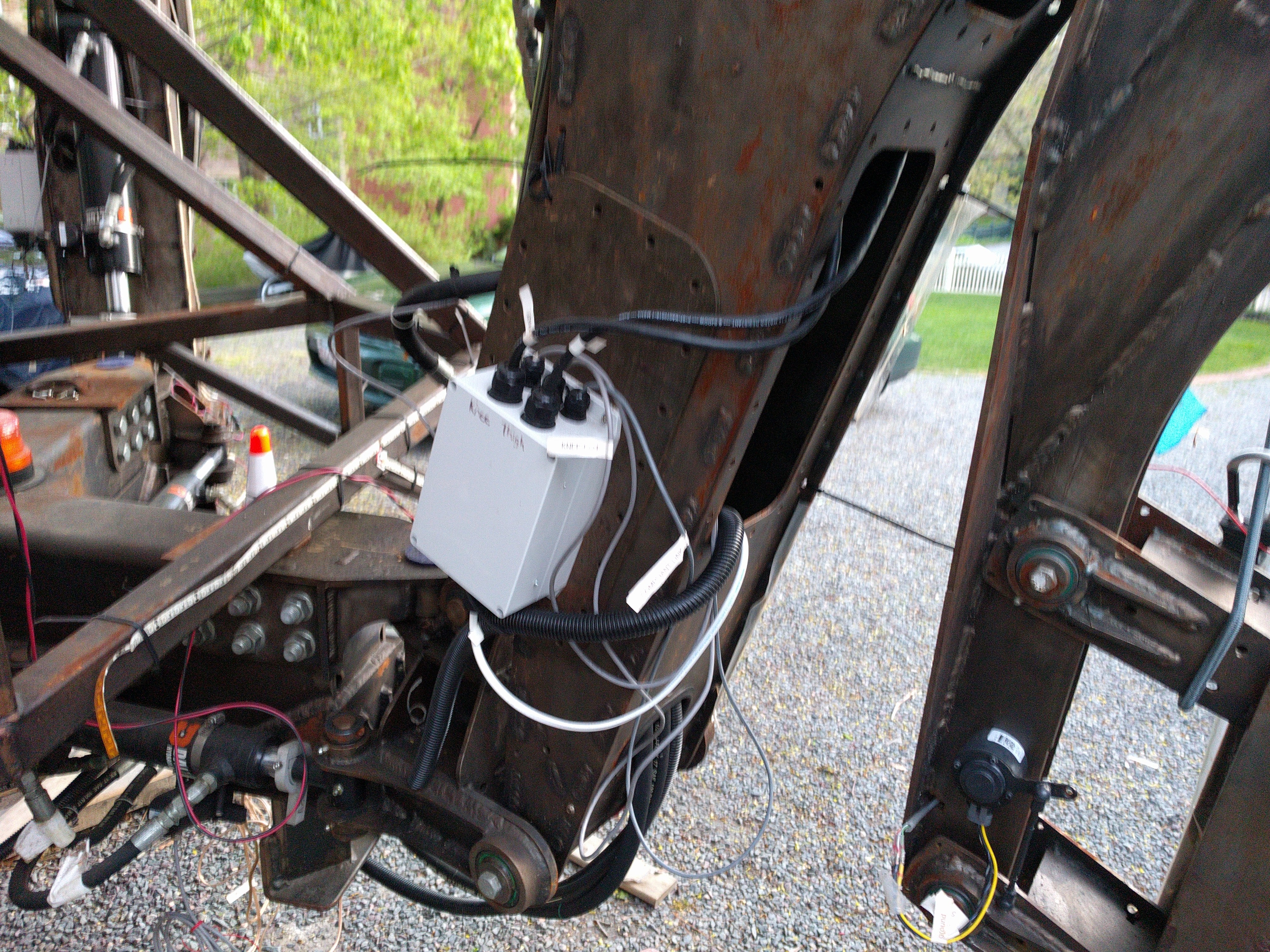
There is still some work left to be done on the electronics. All six legs have a sealed Leg Controller enclosure with a Beaglebone Black inside. The Beaglebones have custom perf board capes. Each cape carries a Dual MC33926 Motor Controller, which can drive four PWM channels to control two pistons. The current plan is to drive the Knee and Thigh joints with those two channels, and add three more boxes located on the chassis to drive the Thigh joints.
All of the Leg Controller boxes are wired up to the network switch. We can plug a laptop into the switch and talk to all the Beaglebones in the legs.
The Beaglebones don’t have software to do closed loop control yet, but we can SSH in and directly set the PWM outputs to move the Knee and Thigh joints.
Software
Most of our activity right now is focused on software. We recently decided to run our code in ROS and have been spending a lot of time getting the ROS ecosystem up and running.
We have a SDF file that Brett Graham put together a little while back. He even linked in the Solidworks files for the robot, so we’ll be able to simulate a realistic model of Stompy in Gazebo.
Current Tasks
Seth Woodworth and Robin Garner have been working on using Vagrant and Ansible to automate building virtual environments. The goal is to be able to repeatably spin up a virtual machine with the ROS environment set up that we can use for development. Hopefully we will be able to use the same Ansible setup to deploy directly to the Beaglebones on the robot.
Spark is working on getting a launcher script to run nodes on different machines across a network.
Chris Stokes has been investigating the SeeedStudio Motor Bridge Cape as a new option for a motor controller cape. If we switched over to it, it would replace the custom perf board capes as well as the MC33926 motor controllers. This option would allow us to control all three leg joints from the Leg Controller BeagleBone. There are pros and cons to running all three leg joints from the Leg Controller, but overall it’s probably preferable to do it if we can.
Here are some more photos, and a video showing the constructed robot.


commendable project there, keep it up
It’s been almost a year since you’ve last updated… Any progress on getting stompy walking?
I just found this. Is this project still alive?
It is! A handful of people still meet every Sunday to work on it. Progress is slow but steady. A few weeks ago it stood up under its own power for the first time!
Good to hear it’s not “dead” and still progressing!
There haven’t been any posts here or on the Facebook in 18 months – are there pictures somewhere else (individual contributor twitters, instagram, other?) or is all available effort going to building rather than photographing?
As one of the backers, I guess it is unlikely that anyone will have the energy to document everything in a way that will help us create a new version. Rather than one to ride on, I want a steam powered one to perform weed control in remote areas – powering itself on the plants it removes, mostly autonomously but with remote supervision.
I just remembered the project. I hadn’t really thought about it in over a year. I’m not a skilled welder or mechanic but I’d be happy to help. Do you still meet on Sunday mornings?
Please update status, even if it’s RIP. Lessons learning/ed? Some of us invested a few beers worth…
Would love any updates you guys have on this! Been following it since the Kickstarter and I’ve always loved the updates you’ve provided, but they’ve slowly dwindled…anyway, if you get a chance let me know if there’s somewhere else you update more frequently!